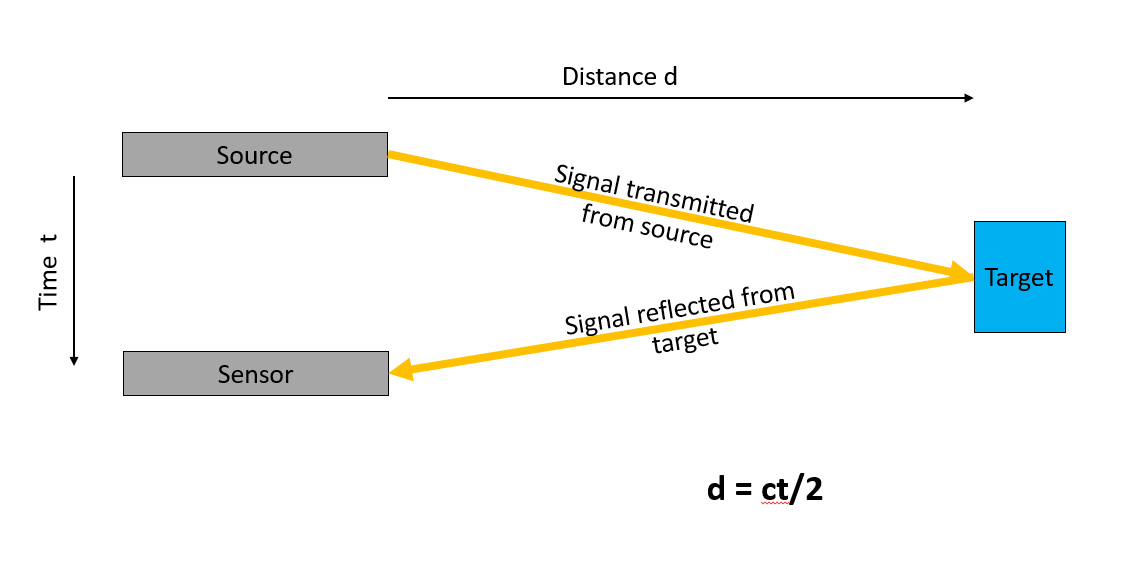
Time of Flight (ToF) equipment uses a range of technologies to establish the distance to an object or between objects. In simple terms the time taken for a signal to travel to an object and return (the time of flight) can be measured and the distance established.
There are two main types of ToF system – acoustic and electromagnetic. In each case the principle is the same. In the diagram on the right, an electromagnetic source (LED, Laser, Radar, etc) transmits a signal which is reflected back from the target and received by the detector, time t later. As the speed of light c is known then the distance d can be calculated as shown.
Acoustic solutions use the same principle but are based on the speed of sound through a known medium, perhaps the most obvious being medical ultrasound.
Applications for Time of Flight include automotive, medical, industrial and security. For automotive, LIDAR is commonly used while for shorter range requirements, technology such as the ESPROS ToF Imaging can be used.
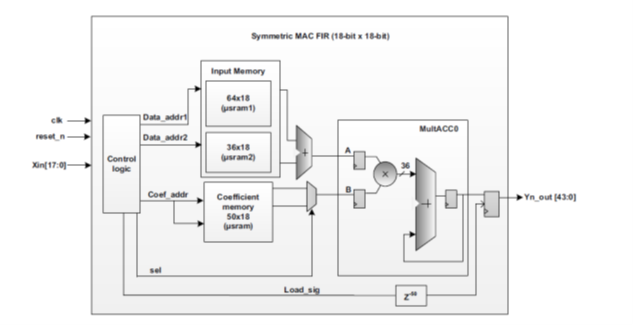
Mathblocks can be used in parallel/cascaded to perform complex DSP functions such as FIR or FFT
For simple use cases, a small microprocessor maybe used to perform the necessary calculations. However, many systems require multiple sensor arrays, correlation between multiple sensor types or additional data extraction such as measuring the doppler shift of the reflected signal to determine relative speed.
In addition, in a real environment it may well be necessary to filter out any interference or noise. Consider you are in a car on a busy road with multiple vehicles using LIDAR – signal sources from other vehicles must be filtered or removed to use ToF reliably to establish the distance to other vehicles and objects around you. This is particularly critical when considering autonomous driving.
By definition, ToF is a real time application. So with multiple signal sources and multiple complex sensor arrays, the need to perform filtering and data extraction on the received signal will require a significant amount of real time Digital Signal Processing. This will simply overwhelm the capabilities of a small microprocessor.
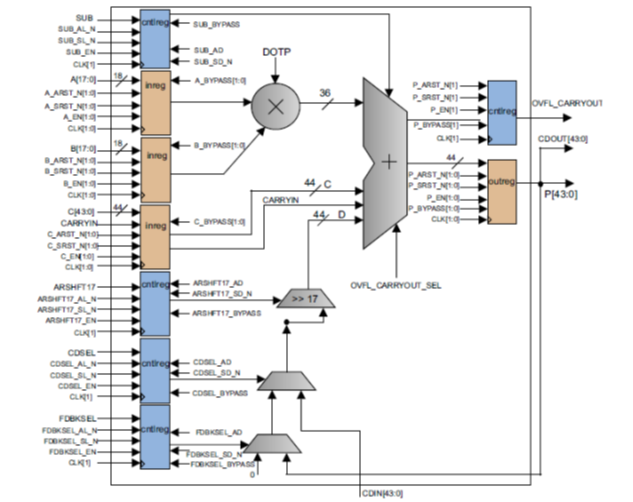
FPGA devices offer a good processing solution for more complex ToF applications. For example the Microchip (Microsemi) Igloo2 and Smartfusion2 FPGA devices include up to 240 HW mathblocks.
These mathblocks can be used in parallel or cascaded to perform complex DSP functions such as FIR or FFT
Additionally the common DSP functions can easily be instantiated in the FPGA using predeveloped IP blocks and connected together using an easy to understand flow simplifying the whole design process.
Read more in this overview from Microchip
To communicate with other parts of a large system, a processor running known software with standard interfaces may still be required. To satisfy this need Microchip have a range of SoC FPGA devices which incorporate microprocessors and FPGA fabric to offer the benefits of fast real time DSP performance and the flexibility of microprocessor software.
Options range from ARM Cortex M3 microcontrollers suitable for running bare metal code or a RTOS, to full multicore 64 bit systems to run a full OS such as Linux.
For more information on the Microchip range of FPGA or SoC FPGA devices, please click on the links below:




For details of DSP support for these FPGAs please click this link or